 هک کردن راحت بازی های اندروید با برنامه GameCih
هک کردن راحت بازی های اندروید با برنامه GameCih آموزش ساخت پهباد کوچک در خانه!!
آموزش ساخت پهباد کوچک در خانه!! Apple سری جدید Mac خود را در ۲۷ اکتبر معرفی خواهد کرد
Apple سری جدید Mac خود را در ۲۷ اکتبر معرفی خواهد کرد 10 شغل تکنولوژی مربوط به آینده که باور نخواهید کرد که واقعا وجود دارند
10 شغل تکنولوژی مربوط به آینده که باور نخواهید کرد که واقعا وجود دارند 950 میلیون دستگاه اندرویدی در خطر هک شدن از طریق پیام رسانی
950 میلیون دستگاه اندرویدی در خطر هک شدن از طریق پیام رسانی دانشمندان تراشه ای اختراع کرده اند که می تواند پرواز سوسک ها را در کنترل بگیرد
دانشمندان تراشه ای اختراع کرده اند که می تواند پرواز سوسک ها را در کنترل بگیرد اوج خلاقیت در چهارمین نمایشگاه پرینترهای سه بعدی
اوج خلاقیت در چهارمین نمایشگاه پرینترهای سه بعدی سوپر ربات چینی به راحتی با مردم ارتباط برقرار می کند
سوپر ربات چینی به راحتی با مردم ارتباط برقرار می کند گوگل در پی کشف هیولای افسانه ای
گوگل در پی کشف هیولای افسانه ای اشک شوق: چاپگر 3D به مادر نابینا امکان داد تا پسر خود را ‘ببیند’
اشک شوق: چاپگر 3D به مادر نابینا امکان داد تا پسر خود را ‘ببیند’
کارکردن در فضا بسیار سخت است . محیطش ناسازگار است . به طوری که حتی کوچکترین کارها به جای چند دقیقه چند ساعت طول میکشد . و همه چیز یا باید با لباس های بزرگ و سنگین انجام شود یا بازوهای رباتی . این چالشی است که وقتی فضانوردان بخواهند راور ها را در چرخش کنترل کنند سخت تر هم میشود . بنابراین ESA در حال کمی تمرین است. ماه آینده فضانورد دانمارکی ، آندرس موگنسون کنترل یک راور در نیدرلند را در حالیکه که در حال چرخش دور زمین دور از سازمان بین المللی فضا ISS است ، به عهده خواهد گرفت .
این امتحان که برای هفتم سپتامبر برنامه ریزی شده ، در ایستگاه فضایی رخ میدهد . در حالیکه راور میانجی سنتاور بر روی زمین مرکز فتی ای اس ای ESTEC در نوردویجک خواهد بود. بر طبق گفته های آژانس فضایی این اولین باری است که تلاشی در جهت این تجربه ی بازخوردی و راوری صورت میگیرد . در حالیکه یک دست دادن از راه دور در ژوئن در ناسا توسط فضانورد ، تری ویرتس در ISS و آندره شیله متخصص تله رباتیک در ESA در نیدر لند صوت گرفت .
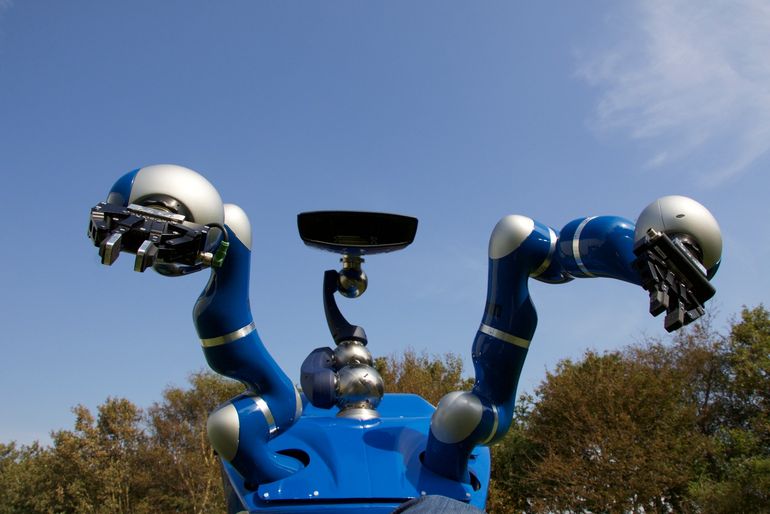
این راور فعل و انفعالی سنتاور شامل وسیله ی سیار 4x4 با یک پایه ی دوربین قابل چرخش ، سنسور های تخمین زدن و مکان یابی و دو بازو است که برای عملیات های دقیق طراحی شده اند . این وسیله از راهنمای لیزری و کنترل های لمسی برای فراهم کردن بازخورد نیرو استفاده میکنند تا موگنسون بتواند قادر به احساس کردن در حال کار کردن با بازوهای رباتی در کارهای ساختی در محدوده های میلیمتری باشد . این تست شامل استفاده از ربات برای " تخته ی وظایف عملیاتی" بر روی زمین میشود ، سپس یک سنجاق فلزی را بر میدارد و آن را به تخته میزند . از آنجایی که سنجاق گنجایش مکانیکی و تحمل کمتر از یک ششم میلیمتر دارد ، کار به دقت بالایی نیاز دارد.
این تست زمانی که ISS در ارتفاع 400 کیلومتری در حال چرخش است اجرا خواهد شد ، با اینکه esa میگوید که ماهواره های لازم فاصله را به حدود 90000 کیلومتر میرسانند . به این معنی که موگنسون همچنین باید با تاخیری جزئی روبه رو شود که دلیلیش سیگنال هایی است که این سفر گردشی را بین زمین و ایستگاه به وجود می آورند . مسئول تحقیق ، شیله میگوید : " زمانی که انسان ها مجبور میشوند عملیات های دقیق انجام دهند، برای مثال نمونه ی ساده ی چرخاندن کلید در قفل؛ به شدت متکی به حس لامسه و رسپتور های دست و بازو هایشان هستند نه بینایی . اطلاعات بصری حداقل اهمیت را دارد . این گونه کارها میتواند با چشم بسته انجام شود . esa در حال انتقال این توانایی به سیستم های رباتیک از راه دور است.

"بدون بازخورد های لمسی، اپراتور یک بازوی رباتی یا یک راور باید دقت کند تا به چیزی آسیب نرساند اگر ربات در تماس با محیط باشد . در نتیجه یک کار ساده زمان زیادی میبرد . به علاوه حس لامسه در هر کاری اطلاعات مهمی درباره ی رابطه ی هندسی اشیا درگیر در بر دارد و بنابراین این امکان را میدهد که کار ها تجربی تر و به طور چشمگیری سریع تر انجام شود . "



