 هک کردن راحت بازی های اندروید با برنامه GameCih
هک کردن راحت بازی های اندروید با برنامه GameCih آموزش ساخت پهباد کوچک در خانه!!
آموزش ساخت پهباد کوچک در خانه!! Apple سری جدید Mac خود را در ۲۷ اکتبر معرفی خواهد کرد
Apple سری جدید Mac خود را در ۲۷ اکتبر معرفی خواهد کرد 10 شغل تکنولوژی مربوط به آینده که باور نخواهید کرد که واقعا وجود دارند
10 شغل تکنولوژی مربوط به آینده که باور نخواهید کرد که واقعا وجود دارند 950 میلیون دستگاه اندرویدی در خطر هک شدن از طریق پیام رسانی
950 میلیون دستگاه اندرویدی در خطر هک شدن از طریق پیام رسانی دانشمندان تراشه ای اختراع کرده اند که می تواند پرواز سوسک ها را در کنترل بگیرد
دانشمندان تراشه ای اختراع کرده اند که می تواند پرواز سوسک ها را در کنترل بگیرد اوج خلاقیت در چهارمین نمایشگاه پرینترهای سه بعدی
اوج خلاقیت در چهارمین نمایشگاه پرینترهای سه بعدی سوپر ربات چینی به راحتی با مردم ارتباط برقرار می کند
سوپر ربات چینی به راحتی با مردم ارتباط برقرار می کند گوگل در پی کشف هیولای افسانه ای
گوگل در پی کشف هیولای افسانه ای اشک شوق: چاپگر 3D به مادر نابینا امکان داد تا پسر خود را ‘ببیند’
اشک شوق: چاپگر 3D به مادر نابینا امکان داد تا پسر خود را ‘ببیند’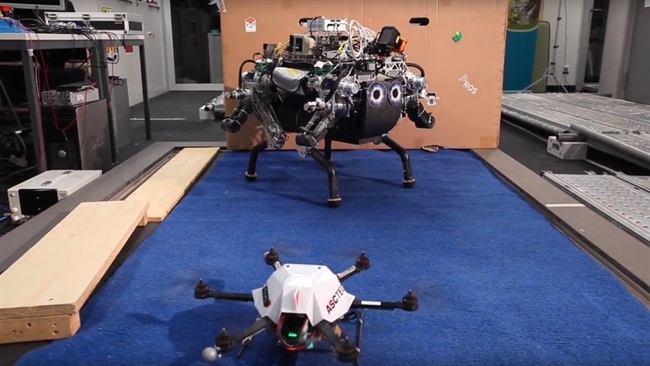
هواپیماهای بدون سرنشین به طور گسترده ای برای رسم کردن نقشه استفاده میشوند ، و این نقشه ها دائم توسط ما انسان ها استفاده میشوند . اخیرا در ازمایشی توسط موسسه ی تحقیقاتی ETH زوریخ هواپیمای بدون سرنشینی نقشه ای رسم کرد تا یک ربات quadropedal بتواند راهش را با آن طی کند . چنین تحقیقی میتواند راه را برای ماموریت های رباتی در زمان حاضر هموار کند . این کار با یک hexacopter شروع شد که در یک فضای کوچک پرواز میکرد ، فضایی که انواع مختلفی از چیزهای خارجی و انواع لایه ها روی زمین داشت . همچنین یک نقطه ی شروع برای این ربات روی زمین طراحی شده بود ، همراه یک محل هدف علامت گذاری شده که باید به آن میرسید.
داده های جمع آوری شده توسط دوربین از بالا به پایین و دیگر سنسور ها سپس برای نقشه ای با رزولوشن بالا از زمین استفاده میشود . این نقشه دائم برای ویژگی های چالش بر انگیز تحلیل میشود . مانند سراشیبی ، سختی و ناهمواری و بلندی . سپس راه برای ربات رسم میشود که به آن این امکان را میدهد تا از نقطه ی شروع به هدف مشخص شده برسد .
همینطور که به آهستگی راه را دنبال میکند، این ربات از سنسور هایی مانند واحد lidar استفاده میکند تا هم تایید کند که نسبت به نقشه در مکان درستی است و هم موانع خارجی را که در حین احرای نقشه ی هوایی در آن مکان گذاشته شده را رد کند . در آخر با موفقیت به هدف رسید ، بدون اینکه دخالت انسان نیاز باشد . هواپیمای بدون سرنشین و ربات میتوانند در ویدئوی پایین در حال کار دیده شوند . در آزمایشی گسترده تر که سال گذشته در آمریکا اجرا شد،از یک هلیکوپتر خودکار با اندازه ی واقعی استفاده شد تا یک ربات چرخی را در منطقه ای در زمین بگذارد و ربات سپس راهش را به مقصد مشخص شده پیدا کرده و ادامه داد.


