 هک کردن راحت بازی های اندروید با برنامه GameCih
هک کردن راحت بازی های اندروید با برنامه GameCih آموزش ساخت پهباد کوچک در خانه!!
آموزش ساخت پهباد کوچک در خانه!! Apple سری جدید Mac خود را در ۲۷ اکتبر معرفی خواهد کرد
Apple سری جدید Mac خود را در ۲۷ اکتبر معرفی خواهد کرد 10 شغل تکنولوژی مربوط به آینده که باور نخواهید کرد که واقعا وجود دارند
10 شغل تکنولوژی مربوط به آینده که باور نخواهید کرد که واقعا وجود دارند 950 میلیون دستگاه اندرویدی در خطر هک شدن از طریق پیام رسانی
950 میلیون دستگاه اندرویدی در خطر هک شدن از طریق پیام رسانی دانشمندان تراشه ای اختراع کرده اند که می تواند پرواز سوسک ها را در کنترل بگیرد
دانشمندان تراشه ای اختراع کرده اند که می تواند پرواز سوسک ها را در کنترل بگیرد اوج خلاقیت در چهارمین نمایشگاه پرینترهای سه بعدی
اوج خلاقیت در چهارمین نمایشگاه پرینترهای سه بعدی سوپر ربات چینی به راحتی با مردم ارتباط برقرار می کند
سوپر ربات چینی به راحتی با مردم ارتباط برقرار می کند گوگل در پی کشف هیولای افسانه ای
گوگل در پی کشف هیولای افسانه ای اشک شوق: چاپگر 3D به مادر نابینا امکان داد تا پسر خود را ‘ببیند’
اشک شوق: چاپگر 3D به مادر نابینا امکان داد تا پسر خود را ‘ببیند’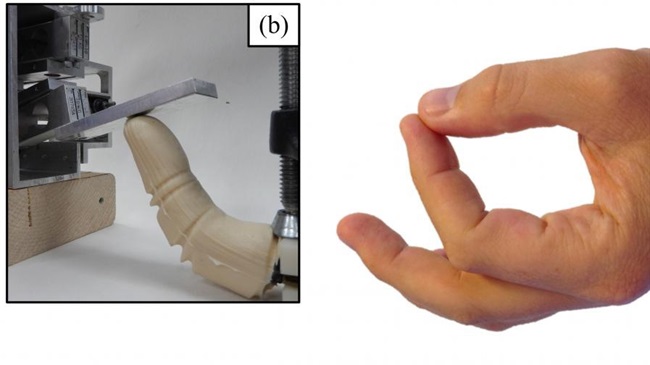
دانشمندان دانشگاه فلوریدا آتلانتیک یک تکنیک تمرینی گرمایی به کار گرفته اند تا به انگشت های رباتی ظاهر و احساسی طبیعی بدهند. با توانایی خم و راست کردن، وقتی که گرم یا سرد میشود ، محققان امیدوارند ساخته ی جدید طبیعیشان در ربات های زیر آبی و در آخر به صورت اعضای مصنوعی پیشرفته استفاده شوند .
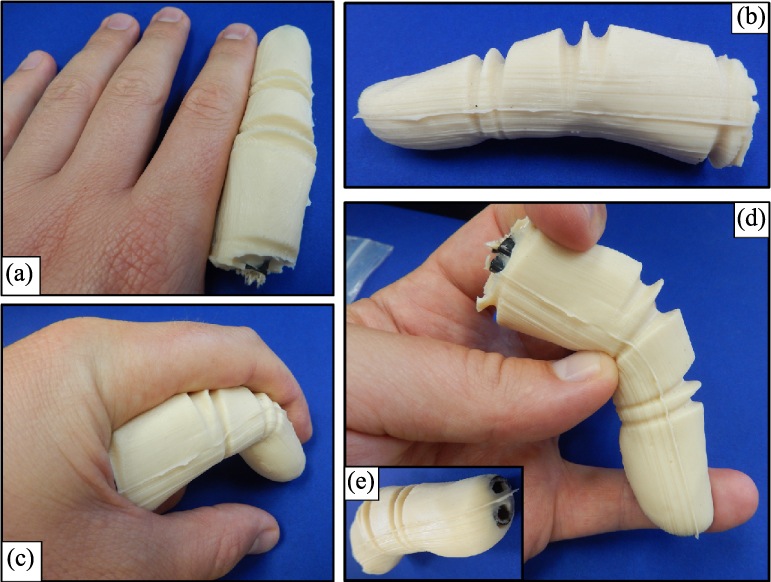
محققان از یک مدل سه بعدی CAD ازانگشت انسان شروع کردند . از این ، آنها مدلی از پیکر را ساخته و سپس فرم و قالب بیرونی و درونی اش را چاپ سه بعدی کردند . بینش یک محرک انعطاف دهنده و باز کننده ساخته شده از آلیاژ حافظه دار (SMA) قرار دادند، همراه با سنسور موقعیت .
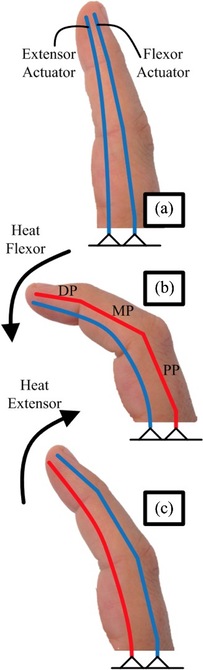
محرک عضله ی خم کننده طوری طراحی شده وقتی گرم میشود شکل انگشت انسان خم شده را بگیرد ، در حالیکه عضله ی باز کننده وقتی گرم میشود صاف میشود . بنابراین با گرم کردن و سرد کردن این محرک ها، انگشت میتواند خم و راست شود . این کار توسط پروسه ای به نام گرم کردن ژول انجام شد ، که جریان های الکتریکی را از یک کنداکتور تولید کننده ی گرما عبور میدهد.
یکی از مشکلاتی که محققان به آن برخوردند ، زمانی بود که طول میکشید تا هر محرک دوباره سرد شود و زمانی که گرم میشد شکل طبیعی خود را ادامه دهد . به همین دلیل ، آنها به ربات های زیر آبی به چشم عنوان اولین جا و مکان نگاه میکنند . در محیط زیر آب، محرک های دمایی در نوک انگشت قرار میگیرند و به آب این امکان را میدهند تا از همه ی حفره ها عبور کرده و به طور موثری محرک ها را سرد کند ، که محققان میگویند سرعت عملکرد وسیله را بالا میبرد.
در نهایت امید است که این رویکرد بتواند برای توسعه و گسترش اعضای مصنوعی بهتر استفاده شود . اریک انگبرک، استاد یار در FAU میگوید : " ما قادر بوده ایم تا به صورت دمایی انگشت رباتیمان را طوری طراحی کنیم تا حرکات انگشت انسان مانند خم شدن و باز شدن را تقلید کند . به خاطر وزن سبک ، چابکی وقدرتش ، طراح رباتی ما مزایای زیادی نسبت به مکانیزم های قبلی دارد و میتواند در آخر به عنوان اعضای مصنوعی استفاده شوند ، مانند عضو مصنوعی . "این تحقیق در روزنامه ی bioinspiration & biomimetics چاپ شد.


